
Science news - RoboSalmon
This page sponsored by Glasgow University Science Festival.
8-Dec-2008
RoboSalmon
Rubberised ladies' tights are not the sort of thing you expect in a respectable engineering department - especially at Glasgow University, the place where academic engineering began. But the ancient traditions are safe in Euan McGookin's hands. This is real engineering, inventive engineering with a purpose.
"Our robot shark needed a swimsuit," says the Centre for Systems and Control lecturer. "So what we tried first was nylon - ladies' tights - covered in latex."
But he and his team soon realised that a smooth surface isn't the best way to move smoothly. It's not how nature does it in fish. And learning lessons from nature is what biomimetics is all about. Fluid dynamics calculations on powerful computers come up with the same surprising answer: "What you want is to generate lots of swirling vortices," Dr McGookin explains. "They push you through the water.
{kind=link}

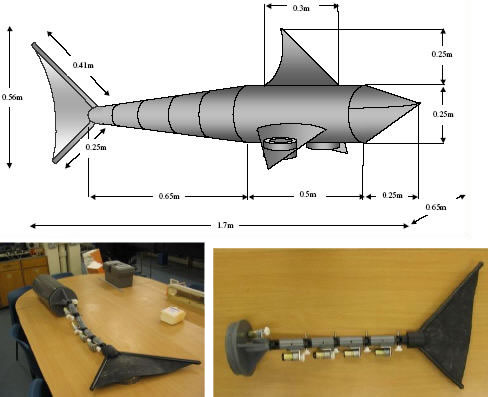
"So with our next generation of robot fish - RoboSalmon - we looked at two skins, a smooth inner one and an outer one made of fishnet stockings. That gives us the little scale shapes along the body. Propulsion with a tail works by generating vortices as the tail swishes - loads of them right along the body. So you have to look at how well you generate those vortices, rather than how hard you make the tail move."
The human way
Small craft that work under water have been around for a while. Oil companies use them to inspect and repair underwater structures and pipelines. Navies employ them for spying, decoys and minehunting. Scientists study subsea life, plot ocean currents and map the seafloor using a wide variety of vehicles.
{kind=link}
But in all these applications the remotely operated vehicles (ROVs) or autonomous underwater vehicles (AUVs) are pushed through the water using the same piece of equipment that ships use on the surface and aeroplanes, until recently, in the sky. The propeller.
{kind=link}
But propellers have problems, says Euan. They are inefficient at low speeds, so they use more energy than a fish does. They are noisy. They disturb the water. They're not good at the delicate little manoeuvres that sharks, salmon and even tadpoles can do without a second's thought.
Nature's way
So underwater robots with fishy tails looks like a good idea. But what for exactly?
Well, take a look at those propeller problems. Turn them around: A robot fish will be quieter than existing ROVs and AUVs . It will use less power, especially at low speeds. It will be more manoeuvrable. It will be able to stay still in currents. It will move through the water without creating ripples and eddies.
All this suggests lots of applications, which we'll look at in the discussion section. They include working alongside a diver and swimming with salmon - an idea that came from civil engineers who were building fish ladders for dams, says Euan. They noticed that salmon would often shoot straight up the ladder, but at times they would sit at the bottom for days on end. Nobody knew why.
A robot salmon could swim alongside the wild salmon and ask them. Well maybe one day. In the meantime it could measure conditions in the water - turbulence, temperature, current speed and direction - as well as how much energy it takes to climb the ladder.
{kind=link}
RoboSalmon could also swim with the wild salmon to count them. "At the moment they put probes in the fish to do this," says Euan. "But that can be harmful to them. Wild salmon numbers seem to be falling, so we don't want to harm them while trying to save them."
A closely linked application is monitoring the environment, Euan says. "You want something that can go into a river, measure pollution levels and find the source of the pollution. But a conventional underwater vehicle creates a lot of turbulence and rakes up the riverbed with the propeller. You want something that can blend into the background - like RoboSalmon."

Swimming this way soon?
So how far off are robots that are as good as fish, only smarter? Well robot fish are swimming around in tanks already. But they are not doing real work out in the rivers. There are several problems still to be solved before that can happen, says Euan.
For a start RoboSalmon's tail helps it to use 5-10% less energy than a propeller. But real salmon can do much better than that. They are 50-70% more efficient than a propeller.
So Euan and his team are currently building models to study different types of tail and measure which works best. "We're going to compare three types of tail - a simple one with wires that moves as one piece, called a tendon tail, a more complicated tail with motors all along it that move more like the real thing, and a propeller."
The researchers are also using a different type of model - a simulation model. This doesn't swim around in a tank. It lives in a computer. It's a mathematical model made of numbers and equations rather than plastic and motors. But it's every bit as useful, says Euan. "Just as a flight simulator mimics how an aircraft flies, our mathematical model mimics how RoboSalmon will swim.
"It does more than that though. We actually build and test RoboSalmon based on what we find out from the simulation. We use it as a design basis."
Pet project
There is one type of design - one application of robot fish - that several research groups are working on enthusiastically but Euan is less excited about. "You could have robot goldfish as pets," he says. "If you put a solar cell in them they could swim around on your desk forever.
"Personally if I was going to have a robot fish as a pet, I'd prefer SHARC."
Video clips on this page
But the ancient traditions are safe in Euan McGookin's hands.
"What you want is to generate lots of swirling vortices," Dr McGookin explains.
"So with our next generation of robot fish - RoboSalmon - we looked at two skins, a smooth inner one and an outer one made of fishnet stockings.
They include working alongside a diver and swimming with salmon
It lives in a computer. It's a mathematical model made of numbers and equations rather than plastic and motors. But it's every bit as useful, says Euan. "J
You could have robot goldfish as pets,"
More help with words
| character | device | engineer | irregular | research |
| specialise | tissue | unpredictable |
What's it all about?
- What kind of shark have the researchers been working on?
- Do fish have smooth surfaces?
- What is biomimetics about?
- What is it that pushes fish through the water?
- What did the fishnet stockings give along the body?
- State three different types of people who use underwater vehicles.
- State four different applications for underwater vehicles.
- What do ships and underwater vehicles use to push themselves through the water?
- What do AUV and ROV stand for?
- What are propellers not good at that fish and tadpoles are?
- In how many different ways does the writer say a robot fish will be better than a propeller-driven vehicle?
- In your own words what is the problem with wild salmon that a robot salmon might help to solve?
- How could it help to do that?
- What else could a robot salmon do?
- What is the problem with the present method of doing this?
- Why is a conventional vehicle not much use for monitoring pollution in a river?
- Robot fish already exist, but what are they not doing yet?
- Why are the researchers building three different models for the tail part of RoboSalmon?
- What other completely different kind of model are they also using?
- What is it used for ?
- What would a solar cell in a robot fish allow it to do?
- If you were these engineers what would you like to do next with RoboSalmon?